
| Support this site - shop Venus / LOAWA lenses below | ||||||||||
 |  |  |  |  |  |  |  |  |  | |
|
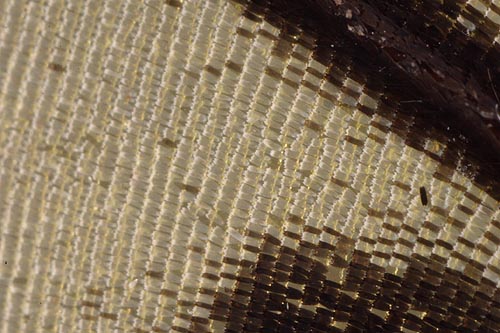
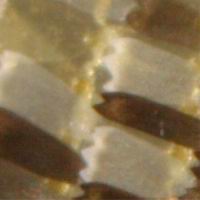
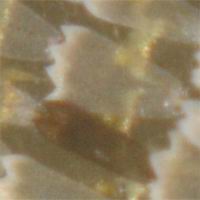
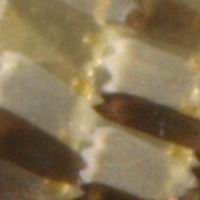
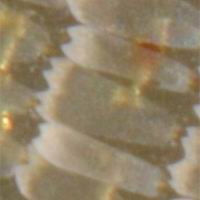
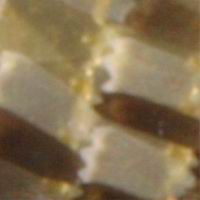
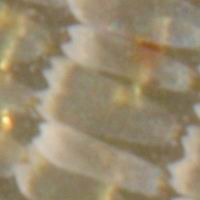
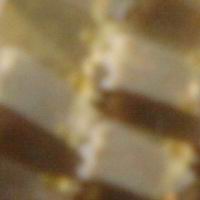
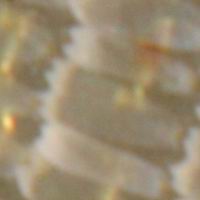
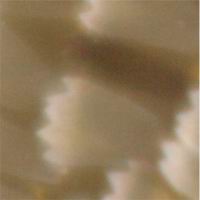
Resolution comparison of 3 macro lens setups at 5x magnification. See also: The lens contestants: Canon MP-E 65 mm f/2.8 macro lens A butterfly wing was used as test target. The Zuiko 20 mm image at f/8.0 shown uncropped but reduced in size to 500 pixels wide (16%) above. The minimum magnification of the Zuiko and Xenoplan lenses are about 5x and 7x respectively, while the maximum magnification of the MP-E 65 is 5x, so comparing these lenses at the exact same magnification is not possible. Images were taken with lenses mounted on an Olympus auto bellows attached to Canon EOS 10D. Images were captured as RAW and converted to 24 bit TIFF files using DPP 2.0.3.7. Sharpness was set to 0 (no sharpening) and no other post processing has been applied to the images. 200x200 pixel crops were excised from the centre and periphery and saved as TIFF prior to conversion as JPEG files. |
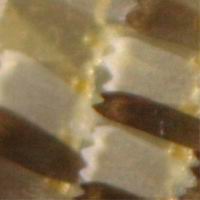
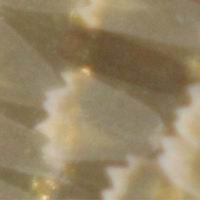
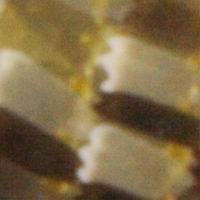
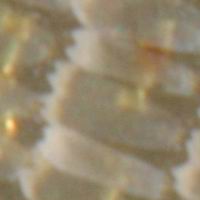
| 100% crops | |||
|
MP-E 65 mm f:2.8 |
Zuiko 20 mm f:2.0 |
Xenoplan 17 mm f:1.7 | |
| f. 2.0 or 1.7 |
n.a. |
 |
|
| f. 2.8 | 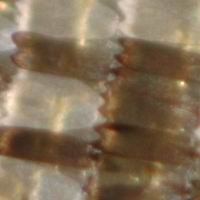 |
 |
 |
| f. 4.0 | 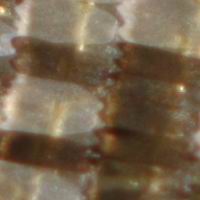 |
 |
 |
| f. 5.6 | 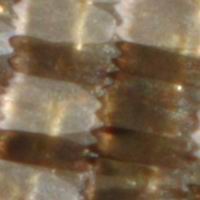 |
 |
 |
| f. 8.0 | 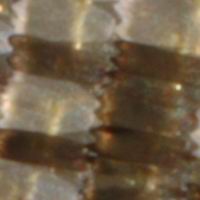 |
 |
 |
| f. 11 | 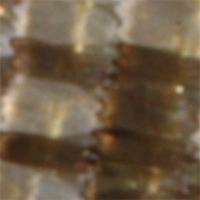 |
 |
 |
| f. 16 | 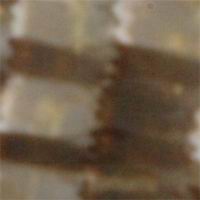 |
 |
 |
|
Conclusions: 1) The MP-E 65 and Zuiko 20 mm exhibit comparable resolutions at all f-stops at 5x magnification. 2) The Xenoplan CCTV lens is very soft wide open, but delivers resolution comparable to the two other contestants when stopped down two stops. 3) Poor resolution is obtained at f/11 and especially f/16 due to diffraction. So getting the optimal image will be a trade off between depth of field and resolution.
|
